Universidade é expulsa da cúpula de IA na Índia por falsa autoria
Direção do AI Impact Summit despejou a Galgotias quando uma professora apresentou um cão-robô chinês como se fosse uma invenção própria
23/02/202608/12/2025
Por Ricardo Marques da Silva
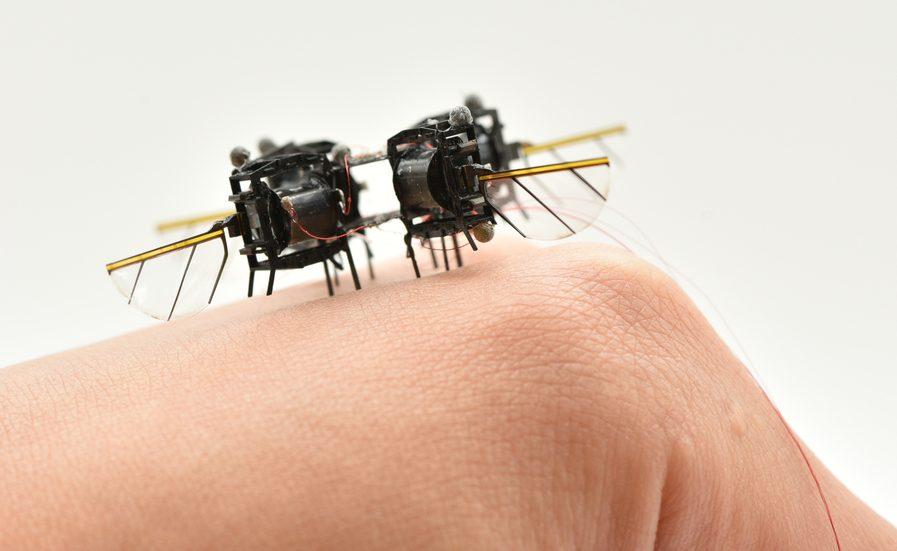
Cientistas do Instituto de Tecnologia de Massachusetts (MIT, na sigla em inglês) desenvolveram um microrrobô que, por meio de um controlador baseado em inteligência artificial, consegue voar com velocidade e agilidade semelhantes às de um inseto. A expectativa é de que, quando aperfeiçoados, os pequenos robôs possam ser usados em missões de busca e resgate, movendo-se por espaços estreitos e inacessíveis a equipamentos maiores e desviando-se dos obstáculos.
Até agora, os microrrobôs aéreos só conseguiam voar lentamente, ao longo de trajetórias suaves, muito longe do voo rápido e ágil dos insetos reais. O que distingue o projeto do MIT é o controlador com IA, que combina alto desempenho e eficiência computacional para aumentar a velocidade e a aceleração e permitir trajetórias de voo acrobáticas. Segundo os pesquisadores, o microrrobô é ágil o suficiente para completar 10 cambalhotas consecutivas em 11 segundos, mesmo quando rajadas de vento ameaçam desviá-lo do percurso.
“Com uma estrutura de controle bioinspirada, o desempenho de voo do nosso robô é comparável ao dos insetos em termos de velocidade, aceleração e ângulo de inclinação”, disse Kevin Chen, líder da pesquisa, em artigo pulicado no portal MIT News. “Queremos usá-lo em cenários nos quais os robôs quadricópteros tradicionais teriam dificuldade de voar. Trata-se de um passo empolgante em direção a esse objetivo”, acrescentou.
O controlador que permitiu esse avanço e atua como o “cérebro” do robô determina sua posição e lhe diz para onde voar, levando em conta a necessidade de otimizações complexas, feitas rapidamente. De acordo com os pesquisadores, um controlador desse tipo exigiria muito poder computacional para ser implantado em tempo real. Para superar esse desafio, o grupo criou um esquema de controle em duas etapas, baseado em IA, que ofereceu a robustez e a eficiência computacional necessárias para manobras complexas e rápidas.
Yi-Hsuan Hsiao, coautor do projeto, explicou: “Esse trabalho demonstra que os microrrobôs, tradicionalmente limitados em velocidade, agora podem aproveitar algoritmos de controle avançados para alcançar uma agilidade próxima à de robôs maiores, abrindo novas oportunidades para locomoção multimodal”. Kevin Chen completou: “Para a comunidade de microrrobótica, espero que nosso trabalho sinalize uma mudança de paradigma, mostrando que podemos desenvolver uma nova arquitetura de controle de alto desempenho”.
O microrrobô dá 10 cambalhotas em 11 segundos
#busca e resgate#inteligência artificial#locomoção multimodal#microrrobô#microrrobôs aéreos
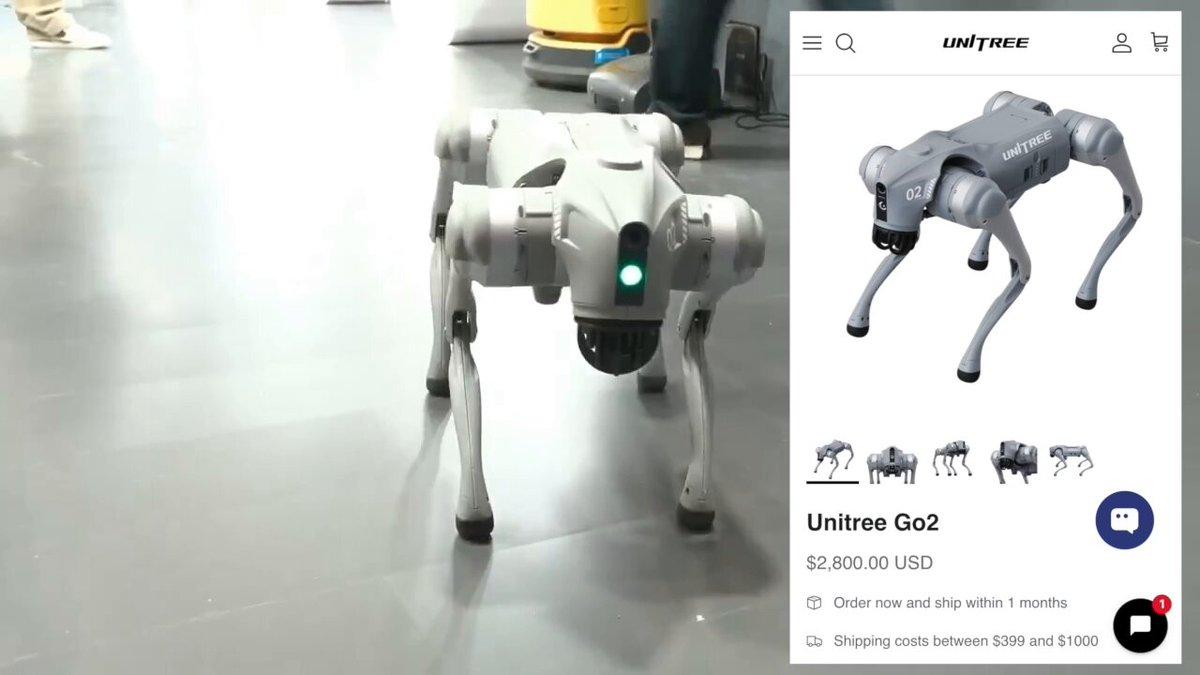
Direção do AI Impact Summit despejou a Galgotias quando uma professora apresentou um cão-robô chinês como se fosse uma invenção própria
23/02/2026
Atuador planetário da Schaeffler proporciona reversão mais suave e melhor desempenho em operações contínuas
12/01/2026
Com quatro modelos disponíveis, marca pretende transformar a manutenção de piscinas com tecnologia e operação automatizada
18/12/2025